作者: asservir 時間: 2017-4-6 19:27 標題: 有無人知佢控制個原理係點?
https://youtu.be/1BEXBWAFYew
via HKEPC Reader for Android
作者: ahuo 時間: 2017-4-7 20:25
電子羅盤...

作者: uvvvvw 時間: 2017-4-7 21:06
萬向輪 + 加速計&陀螺儀
3個轆—齊順畤針轉,成架車仔順時針轉。
3個轆—齊逆畤針轉,成架車仔逆時針轉。
左轆順,右轆逆,向前。
反之向後。
加速計&陀螺儀 check住方向。
有畤用埋電子指南针校正方向。
作者: marlin12 時間: 2017-4-7 21:35
本帖最後由 marlin12 於 2017-4-8 10:51 編輯
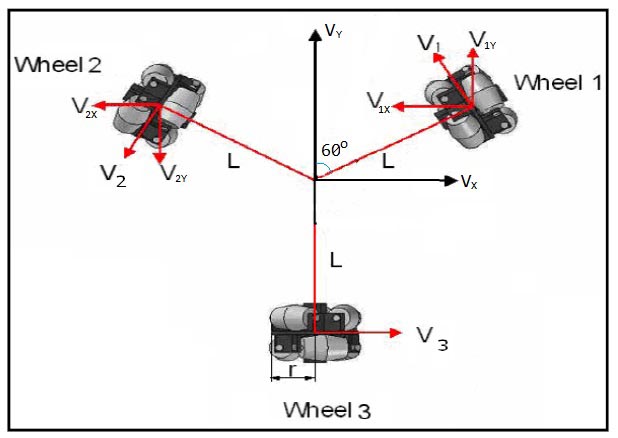
omni wheel robot無咩咁特別,只係一架可以自轉和唔同方向前進既車仔。
[注意:owni wheel好貴、爪地性能差(上斜差、容易漂)、前進效率低,唔值得整黎玩]
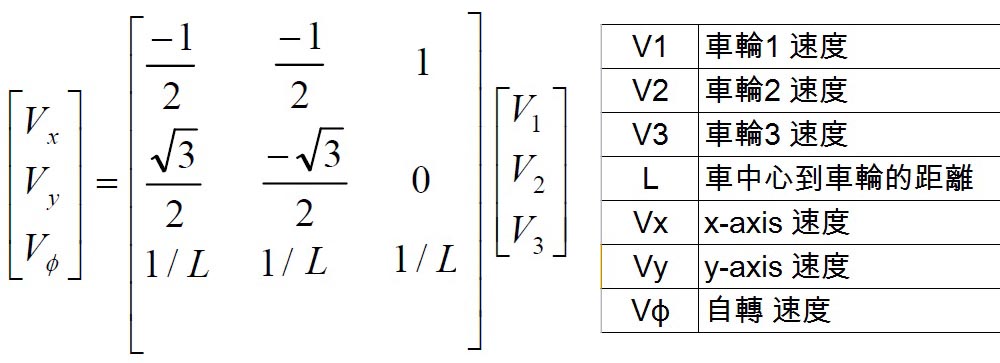
控制原理亦都好簡單,一個3X3 matrix可以代表晒。


呢度有篇文章講點樣控制
Control of Omni-Directional Mobile Robot Motion
呢度講點樣用Arduino去控制
How to build an Omni Wheels Robot
淘寶有得賣omni wheel車輪和車架
淘寶 omni wheel
呢度講點樣用Arduino去讀3軸[電子羅盤]
GY-271 Electronic Compass
淘寶有得賣電子羅盤模塊
淘寶 - 3軸電子羅盤模塊
 圖片附件: geometry.jpg (2017-4-7 21:29, 50.63 KB) / 下載次數 49
圖片附件: geometry.jpg (2017-4-7 21:29, 50.63 KB) / 下載次數 49https://h0.hkepc.com/forum/attachment.php?aid=1973120&k=bd332fb5587eefea29131d7dae07ced1&t=1781433169&sid=18kKKnZ6sSa
 圖片附件: matrix.jpg (2017-4-7 21:29, 74.15 KB) / 下載次數 48
圖片附件: matrix.jpg (2017-4-7 21:29, 74.15 KB) / 下載次數 48https://h0.hkepc.com/forum/attachment.php?aid=1973121&k=6b77030fb057dfbf1110426c0f17db2d&t=1781433169&sid=18kKKnZ6sSa
作者: samshum2 時間: 2017-4-27 22:21
回覆 4# marlin12
西9利
原來MATRIX係甘用
作者: Super169 時間: 2017-4-29 11:52
回覆 4# marlin12
wah, 原來有D咁好玩既野.
去 youtube 搵下, 連大既車都有:
https://www.youtube.com/watch?v=vAiwLRGsNrE
唔知幾時會出埋私家車, 泊位就易喇, 街邊位打橫泊入去就得.
垂直位出入車又唔駛倒後, 向前直入, 出果陣將上半身轉180度就出得. 90度直角轉灣都無難度. 爽.
作者: penelopeblue 時間: 2017-5-2 12:09
回覆 5# samshum2
似乎係jacobian matrix
作者: morris 時間: 2017-5-4 00:21 標題: RE: 有無人知佢控制個原理係點?
本帖最後由 morris 於 2024-3-22 13:37 編輯
......
作者: penelopeblue 時間: 2017-5-4 19:34
本帖最後由 penelopeblue 於 2017-5-4 19:39 編輯
回覆 8# morris
話分兩頭,做approximation 嘅係solve inverse kinematics. (你比你想要嘅Xyz 我,我比摩打角度/推桿長度你)
另一方面Jacobian 嘅property 係linear transformation from joint velocity space to task velocity space (姐係你比啲摩打速度我,我話比你聽舊嘢行或者轉得幾快)呢個係exact solution. 無論你用partial derivatives 定係geometry 個舊matrix 個名都唔會變 (因為佢係unique existence
小弟不才讀得一Sem robotics
作者: morris 時間: 2017-5-4 20:12
本帖最後由 morris 於 2024-3-22 13:37 編輯
......
作者: penelopeblue 時間: 2017-5-4 22:05
回覆 10# morris
ching言重喇, 我唔係工程本科既, 喺U度讀過一兩個course滿足下興趣姐